Bottom-up Object Detection by Grouping Extreme and Center Points
写在前面
本文与2019年1月23日挂在arxiv上,是目前单阶段目标检测性能最好的研究,在COCO测试集上达到了AP43.2%
本文是CornerNet的改进,他们的思想都是将目标检测问题转换为某种形式的关键点提取问题,与流行的目标检测方法都不同
CornerNet是将目标的top-left和bottom-right点作为关键点进行检测
ExtremeNet则是提取了left-most, right-most, top-most, bottom-most四个点,再用纯几何的方法得到最终的目标
主要思想
作者认为,当前长方形的anchor并不是大多数物体真正的形状,强行将所有物体放在同样的anchor中是不合理的,其中会包含很多干扰性的背景像素
相比于CornerNet本文的方法有以下两点的不同:
- 关键点的选取和组合不同,作者认为,
corner只是另一种形式的的bbox,也会遇到大多数top-down目标检测器一样的问题。另外,corner点定义在了物体外部,加大了神经网络的识别难度,所以ExtremeNet选择了在目标上的关键点 CornerNet是以几何式组合的,而本文完全依靠物体外观,没有隐式的特征学习。本文方法的实际表现要好很多。
本文方法的基本结构如下图所示:
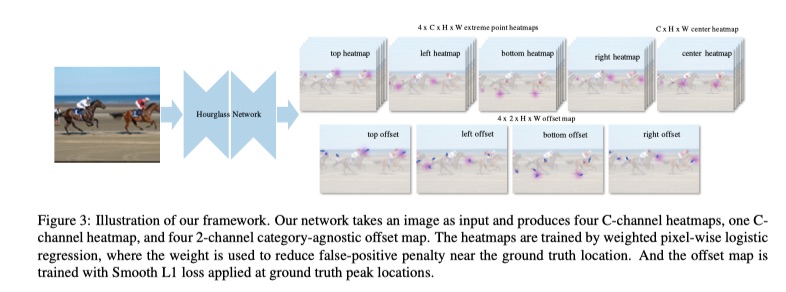
ExtremeNet的输出通道数为:\(5*c+4*2\)。对每个类别,预测4张极值点heatmap和1张center map所以是5张。然后,对每种极值点heatmap,再预测2张offset map(分别对应XY轴方向),注意是所有类别公用的且center map没有,所以只有4x2张。
关键点
-
标注方法
传统标注使用矩形框标注目标,而矩形框一般会用左上角和右下角两个点表示。
而在ExtremeNet中,使用四点标注法,即一个目标用上下左右四个方向上的极值点来表示。额外的,通过这四个点可以计算出该目标的中心坐标。
-
关键点检测
使用
fully convolutional encoder-decoder network预测一个多通道heatmap,每个通道都对应一个类别的关键点。使用
HourglassNetwork作为backbone,对每张heatmap进行加权逐点逻辑回归,加权的目的是为了减少ground truth周围的虚警惩罚。 -
中心点分组
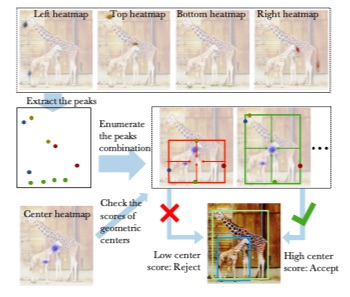
大体分为两个步骤:
-
第一步,ExtrectPeak。 即提取heatmap中所有的极值点,极值点定义为在3x3滑动窗口中的极大值。
-
第二步,暴力枚举。对于每一种极值点组合(进行适当的剪枝以减小遍历规模),计算它们的中心点,如果center map对应位置上的响应超过预设阈值,则将这一组5个点作为一个备选,该备选组合的score为5个对应点的score平均值。

-
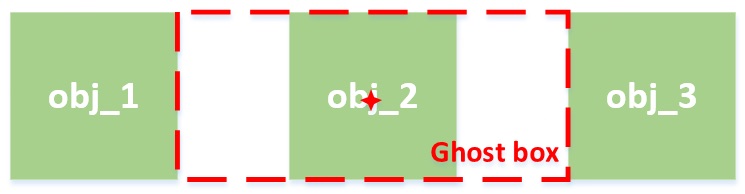
Ghost box抑制
何为ghost box?如下图所示,若存在多个并排排列且大小相近的物体,则对obj_2这个目标来说,在指定center时,会有两个选择,一个是真实的目标,另一个是大一圈的ghost box
-
边缘融合
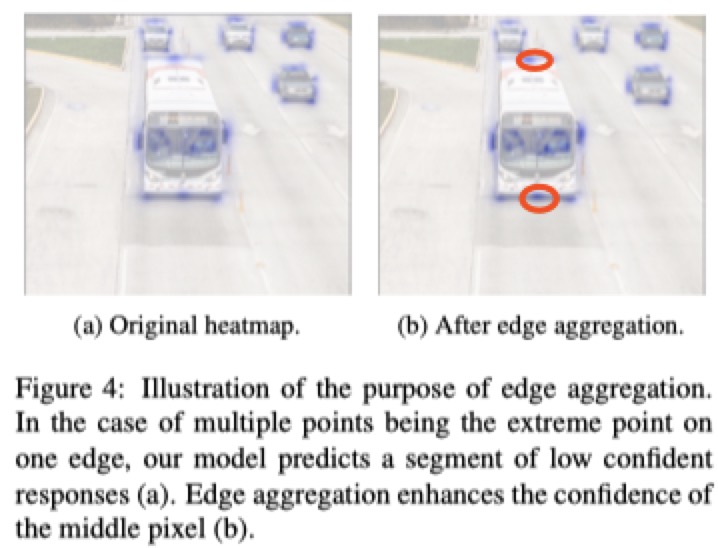
极值点的定义并不唯一,这就导致如果物体沿着水平或垂直方向边缘形成极值点的话(比如汽车顶部),沿着该边缘的点可能都会被当做极值点。网络会对沿对象任何对齐的边缘产生弱响应,而不是单个的强响应。这会引起两个问题:一方面,较弱的响应可能低于预设的极值点阈值,导致漏掉所有的点;另一方面,即使侥幸超过了阈值,但其score可能还是PK不过轻微旋转过的目标相比(在两个方向上都有较大的响应)。
解决办法是,对每一个极值点,向它的两个方向进行聚集。具体做法是,沿着X/Y轴方向,将第一个单调下降区间内的点的score按一定权重累加到原极值点上。效果如下图所示,可以看出,红圈部分的响应明显增强了。
-
开源代码
参考文献
- Bottom-up Object Detection by Grouping Extreme and Center Points
- 论文学习笔记ExtremeNet(Bottom-up Object Detection by Grouping Extreme and Center Points)