Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
写在前面
Faster R-CNN发表在ECCV-2016上,是RCNN系列的又一部加强版
本文推出了RPN候选区生成网络,代替了传统的Selective search,该网络与Fast R-CNN网络共享一部分参数,可以完成端到端的训练
主要思想
作者开篇提到本文的动机,在Fast R-CNN已经改进了预测部分的速度以后,生成候选区域成了整个目标检测系统的性能瓶颈,所以推出了一种类似于全卷积网络的RPN来生成候选区,将原来串行运行在CPU上的部分可以在GPU并行加速
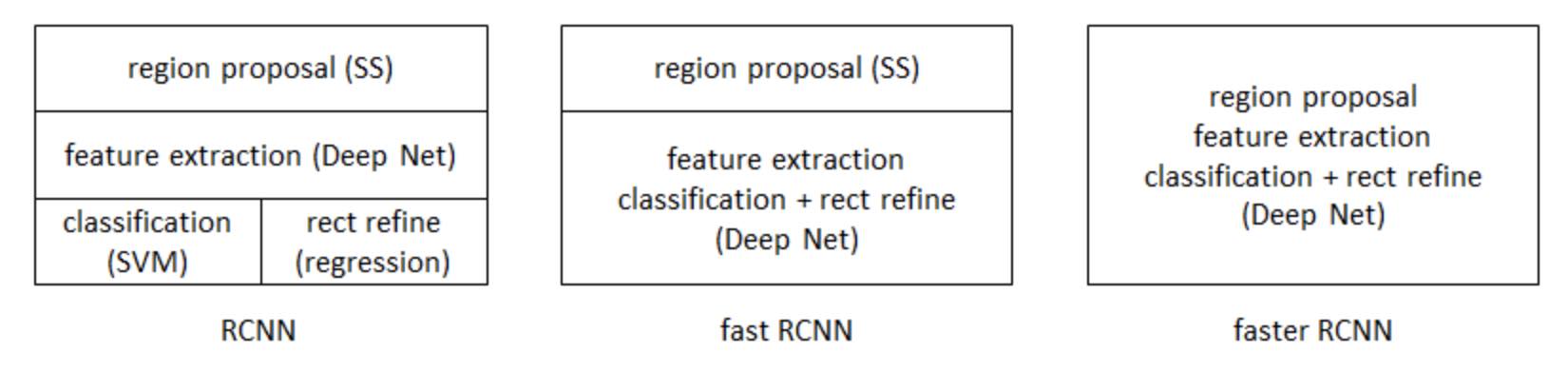
至此2stage目标检测网络已经由原来的三部分合成了现在的一部分,如下图所示
使用Faster R-CNN进行目标检测可以分为以下几步:
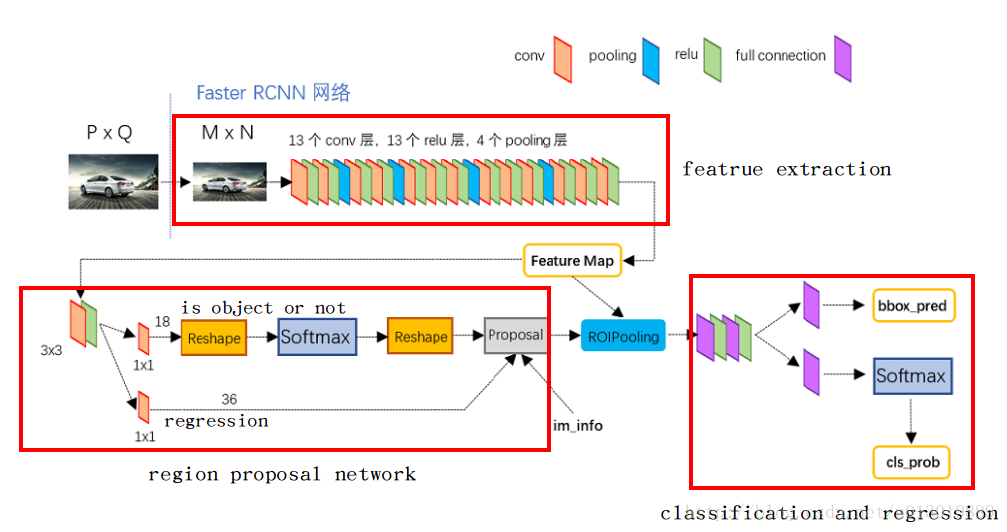
- 首先对原始图片进行裁剪操作,将裁剪后的图片送进CNN中获取该图像对应的特征图
- 对特征图上的每一个锚点上选取9个候选的ROI(3个不同尺度,3个不同长宽比),并根据相应比例映射到原始图象中
- 随后将这些ROI送进RPN网络中,RPN网络对这些ROI进行二分类,同时进行回归(包括\(\Delta x, \Delta y, \Delta w, \Delta h\)),然后对ROI做NMS,选取其中最好的K个ROI
- 然后对不同大小的ROI进行ROI Pooling,输出固定大小的feature map
- 最后将其输入简单的检测网络中,最后完成BB的分类与回归,输出检测结果BB
一些概念
-
锚点
即特征图的最小单位点,比如原始图像大小是256*256,CNN包含4个Pool层,最终得到的特征图大小是16*16,最小单位即是锚点,该特征图包含256个锚点
-
候选ROI
针对每一个锚点,都根据不同尺度(128,256,512像素)和不同长宽比(1:1,0.5:1,1:0.5)产生9个BB,所以该特征图共包含9*16*16个候选ROI
-
RPN网络
RPN网络用来对特征图上的ROI进行二分类和定位,推选出最终的ROI,此时的ROI是相对于原始图像的
-
ROI Pooling
ROI Pooling使用最大值池化将上一步得到的ROI固定到特定大小的特征图Feature map上,以便进行最后的分类和回归操作
ROI Pooling的一个不足,由于预选ROI的位置通常是有模型回归得到的,一般来说是浮点数,而池化后的特征图要求尺度固定,因此ROI Pooling这个操作存在两次数据量化的过程。1)将候选框边界量化为整数点坐标值;2)将量化后的边界区域平均分割成kxk个单元,对每个单元的边界进行量化。事实上,经过上面的两次量化操作,此时的ROI已经和最开始的ROI之间存在一定的偏差,这个偏差会影响检测的精确度。
-
正负样本的划分
- 对每个标定的GT box,与其重叠比例最大的anchor记为 正样本 (保证每个ground true 至少对应一个正样本anchor);
- 对1)剩余的anchor,如果其与某个标定区域重叠比例大于0.7,记为正样本(每个ground true box可能会对应多个正样本anchor。但每个正样本anchor 只可能对应一个grand true box);如果其与任意一个标定的重叠比例都小于0.3,记为负样本。
- 对上面两步剩余的anchor,弃去不用;跨越图像边界的anchor弃之不用
-
训练策略
Faster R-CNN的训练可以分为四步:
- 使用ImageNet预训练,训练一个RPN网络
- 用RPN生成的ROI训练一个Fast R-CNN网络
- 使用第2步得到的网络重新训练一个RPN网络,但是将共享的CNN部分学习率设置为0,仅训练RPN独有的部分
- 使用新的RPN生成的ROI继续fine-tune检测网络中特有的网络层