Object detection
Object Localization
对于一个识别类别的神经网络
- pedestrian
- car
- motorcycle
- background
同时输出¥$b_x,b_y,b_h,b_w$¥和类别标签(1-4)
定义标签\(y = [P_c,b_x,b_y,b_h,b_w,C_1,C_2,C_3]\)
\(b_x,b_y\)代表边界框的中心点,\(b_h,b_w\)代表边界框的高度和宽度
\(P_c\)表示图片中是否有任意目标(1-4)
\(C_1,C_2,C_3\)分别表示是否有pedestrian,car,motorcycle
损失函数(以平方差举例)
\[L(\hat y,y) = (\hat y_1 - y_1)^2 + (\hat y_2 - y_2)^2 + ... + (\hat y_8 - y_8)^2 \ \ \ \ if\ y_1 = 1\] \[L(\hat y,y) = (\hat y_1 - y_1)^2 \ \ \ if\ y_1 = 1\]Landmark Detection
为识别特定的图像可以在训练集图像上标记需要识别图像的landmark特征点,需要注意的是同一个landmark m需要在所有训练图片上保持一致
Objection Detection
Sliding windows detection
- 定义一个滑动窗口,以固定的步长对一张图片进行遍历,分别经过卷积神经网络后判断是否存在特定的物体以0,1分类
- 重复上述操作,但是重新定义一个较大的窗口
- 重复上述操作,但是重新定义一个较大的窗口
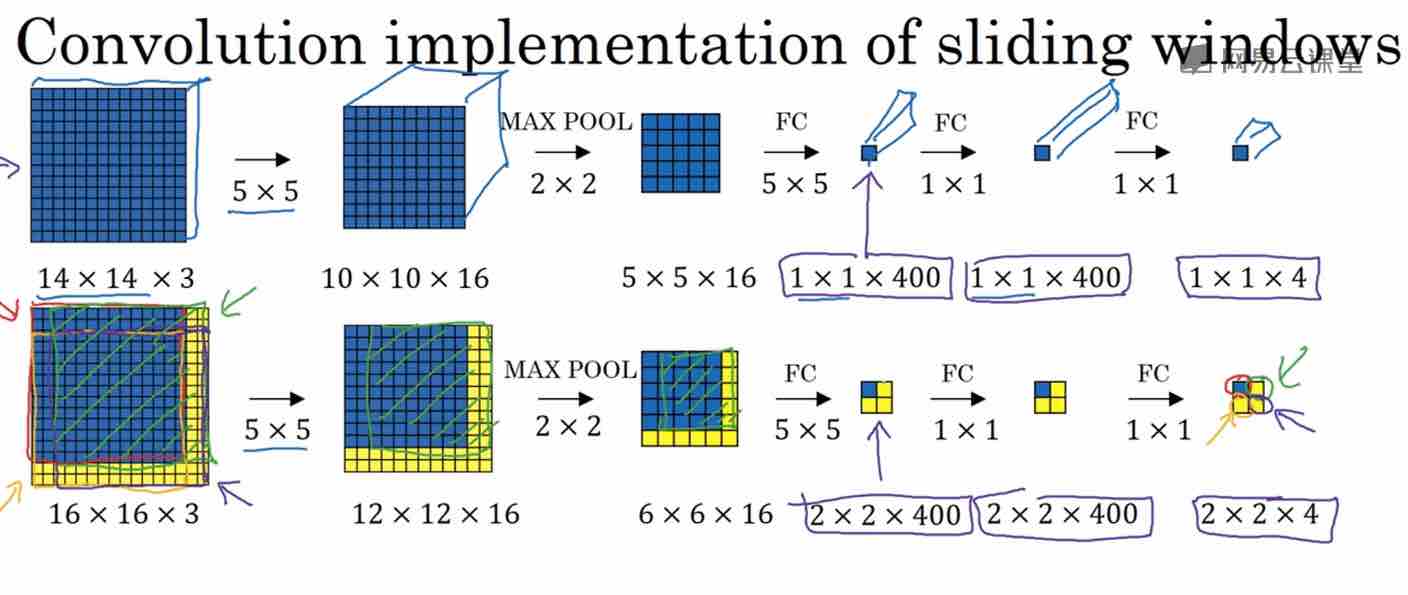
滑动窗口检测对计算力的要求非常高
新的算法将全连接层FC用卷积实现,可以较少重复计算
Bounding Box Predictions
YOLO
交并比函数(IoU)
IoU函数可以用来评价检测算法的性能表现,基本思想是计算预测区域与标签区域的交集A与并集B的面积之比
\[IoU = \frac{S_A}{S_B}\]IoU>0.5 则认为识别正确
Non-max suppression alogorithm(NMS)
Anchor Boxes
为了在同一个格子中能够检出多个重叠的物体,有了Anchor Boxes方法
Anchor Boxes基本思想是定义两个Anchor box 在标签y中把两个anchor box联合起来
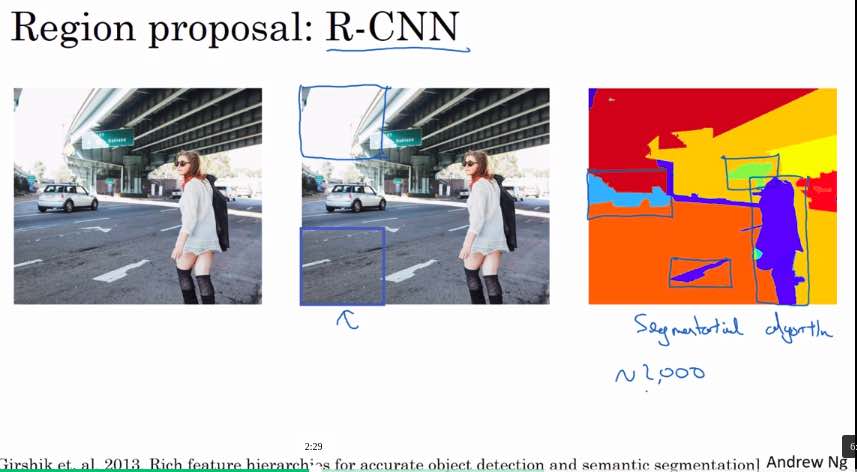
Region proposal:R-CNN
R-CNN是先经过segmental algorithm,照片分类为很多子目标再把子目标拿去卷积,用的是传统的滑动窗口算法,即每一个窗口分别进行卷积